
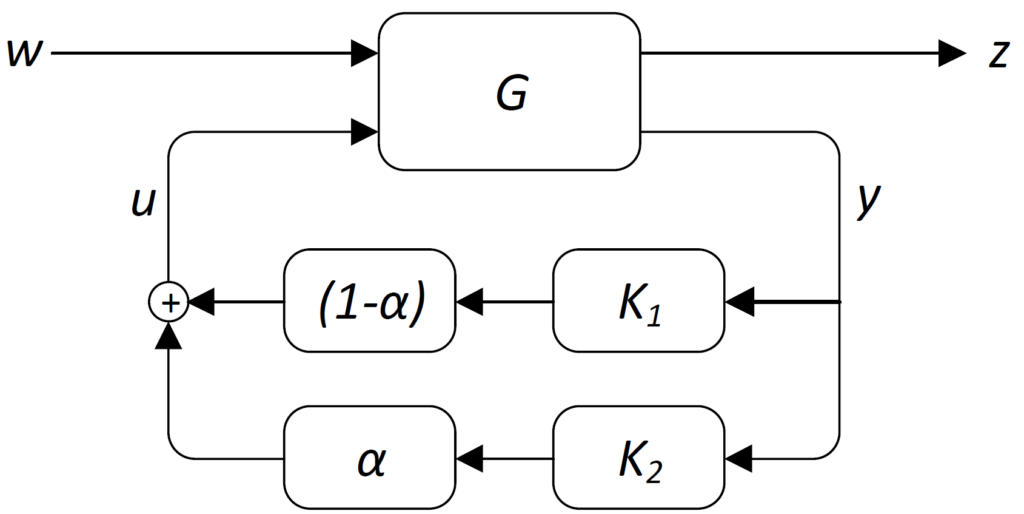
It frequently happens that one would like to implement control-switching schemes to facilitate changing modes, where different controller are subsequently active with the aim to achieve different objectives. Many of such control implementations can be subsumed as shown in the following interconnection.
Here  is the plant to be controlled, while
is the plant to be controlled, while  ,
, ![\alpha\in[0,1]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-8d1a0bdc10aa5d9a9cd33815a79df449_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") , represents the control switching scheme (i.e. for
, represents the control switching scheme (i.e. for  controller
controller  is active, while for
is active, while for  controller
controller  is active). Here
is active). Here  is a time-varying parameter that in practice is often switched from 0 to 1 in an instantaneous manner. In other more careful implementations, the parameter is slowly varied for 0 to 1 to facilitate a smoother transitioning between the different controllers.
is a time-varying parameter that in practice is often switched from 0 to 1 in an instantaneous manner. In other more careful implementations, the parameter is slowly varied for 0 to 1 to facilitate a smoother transitioning between the different controllers.
There are a few issues with this approach:
- An instantaneous switch may cause significant disruptions in the closed loop system. The effect is similar to recovering from a nonzero initial condition.
- For smoother implementations, where is varied slowly from 0 to 1, it is unknown if the closed loop system is guaranteed to be stable. This is certainly a problem if either one of the controllers is unstable.
A Youla based solution
To resolve the latter issues, one can proceed according to the approach suggested in [11], [12]. This proceeds as follows.
Let be a proper LTI system that admits the realization
![\[G=\left(\begin{array}{cc}G_{11}&G_{12}\\G_{21}& G_{22}\end{array}\right)=\left[\begin{array}{c|cc}A&B_1&B_2\\ \hline C_1&D_{11} &D_{12}\\ C_1&D_{21} &D_{22} \end{array}\right],\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-07159522c50d5c5b93510c3ce723a0d3_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 and
and  are stabilizable and detectable respectively. Then one can compute the coprime factors
are stabilizable and detectable respectively. Then one can compute the coprime factors  , which satisfy the Bezout identity
, which satisfy the Bezout identity ![\[\left(\begin{array}{cc}\tilde{X}&-\tilde{Y}\\-\tilde{N}&\tilde{M} \end{array}\right) \left(\begin{array}{cc}M&Y\\N&X\end{array}\right)=I,\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-0628c1594e708c00a63a9c7e4788f3a8_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 .
.
This can be done using the function fCoprime (details). Given and the eight transfer matrices that satisfy the Bezout identity, one then can arrive at an entire family of controllers that internally stabilize .
This parameterization is given by
![\[K=(Y-MQ)(X-NQ)^{-1}=(\tilde{X}-Q\tilde{N})^{-1} (\tilde{Y}-Q\tilde{M}),\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-bf102db1654409d8a9b428b480d1800b_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 can be any transfer matrix in . This transfer matrix is the celebrated Youla parameter.
can be any transfer matrix in . This transfer matrix is the celebrated Youla parameter.
Note that  can also be written as a lower LFT of some fixed transfer matrix
can also be written as a lower LFT of some fixed transfer matrix  and the Youla parameter :
and the Youla parameter :
![\[K=(Y-MQ)(X-NQ)^{-1}= \left(\begin{array}{cc}L_{11}&L_{12}\\L_{21}& L_{22}\end{array}\right)\star Q.\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-84df9725d2dc6c9dfa2bd909b5f75b2d_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
that internally stabilizes , even if is unstable, it is possible to obtain an  interconnection by considering the coprime factors of
interconnection by considering the coprime factors of  . Then the Youla parameter can be taken to be
. Then the Youla parameter can be taken to be ![\[Q=-(\tilde{X}U-\tilde{Y}V)(-\tilde{N}U+\tilde{M}V)^{-1}=\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-7f562d636643bdd4be290ca7b4697d8d_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![\[=-(\tilde{X}K-\tilde{Y})(-\tilde{N}K+\tilde{M})^{-1}.\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-5a9f5dac97f626cc73f22838ecbf0c95_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
and . Then one can obtain the Youla parameters  and
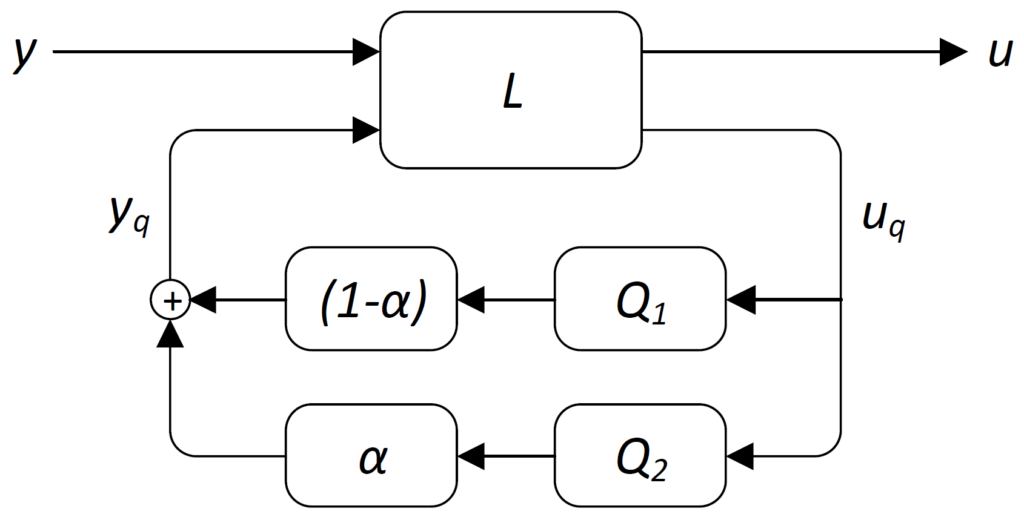
and  as sketched above. This leads to the Youla based control-switching scheme depicted in the following figure with:
as sketched above. This leads to the Youla based control-switching scheme depicted in the following figure with: ![\[Q=(1-\alpha)Q_1+\alpha Q_2,\ \ \ \alpha\in[0,1].\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-be66e1c726a590264cbdb3c16ed184de_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
When  is fixed for all
is fixed for all  , the Youla parameter
, the Youla parameter  is stable, which also implies that the control interconnection of the latter figure is stable. Hence, for any trajectory
is stable, which also implies that the control interconnection of the latter figure is stable. Hence, for any trajectory ![\alpha(t)\in[0,1]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-19df1fbf9d5ef053ef0ecb7f47349a3f_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") during the switching phase, the resulting controller can be regarded as a linear time varying system. In [11] it is shown that also for this case, the closed-loop system will remain stable.
during the switching phase, the resulting controller can be regarded as a linear time varying system. In [11] it is shown that also for this case, the closed-loop system will remain stable.
Note in case is already stable, i.e.,  , then the matrices in the Bezout identity may be taken as:
, then the matrices in the Bezout identity may be taken as:



 ,
, 
In this case, we obtain  with the Youla parameter
with the Youla parameter  .
.
Implementation
The function ![[L,Q]=fYoulaSwitch(G_{22},K_1,K_2,\cdots,K_N)](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-c32b3f2d81f9fc85470c198f53acd232_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") implements the described procedure. Here:
implements the described procedure. Here:
 is the part of the plant seen by the controller. This realization must be stabilizable and detectable.
is the part of the plant seen by the controller. This realization must be stabilizable and detectable.- The controllers
 ,
,  , which both stabilize
, which both stabilize  .
.
As output this yields:
- The transfer matrix with realization

- The structure with the Youla parameters
 .
.
These can be interconnected as  in accordance with the figure above, or, in case of more than two controllers as
in accordance with the figure above, or, in case of more than two controllers as  with
with  .
.
Note: The algorithms works for continuous- as well as discrete-time systems.
Demonstrating example
A demonstration of this procedure is found here.