
IQClab also provides the option to perform LPV controller synthesis with full-block multipliers. This yields controllers that are gain-scheduled and depend on time varying parameters whose values are available via measurements or estimation algorithms.
Note: It is assumed that the user is acquainted with the LPV controller synthesis literature. The reader is referred to [7] and references therein for further information.
We consider the system interconnection shown in the following figure.
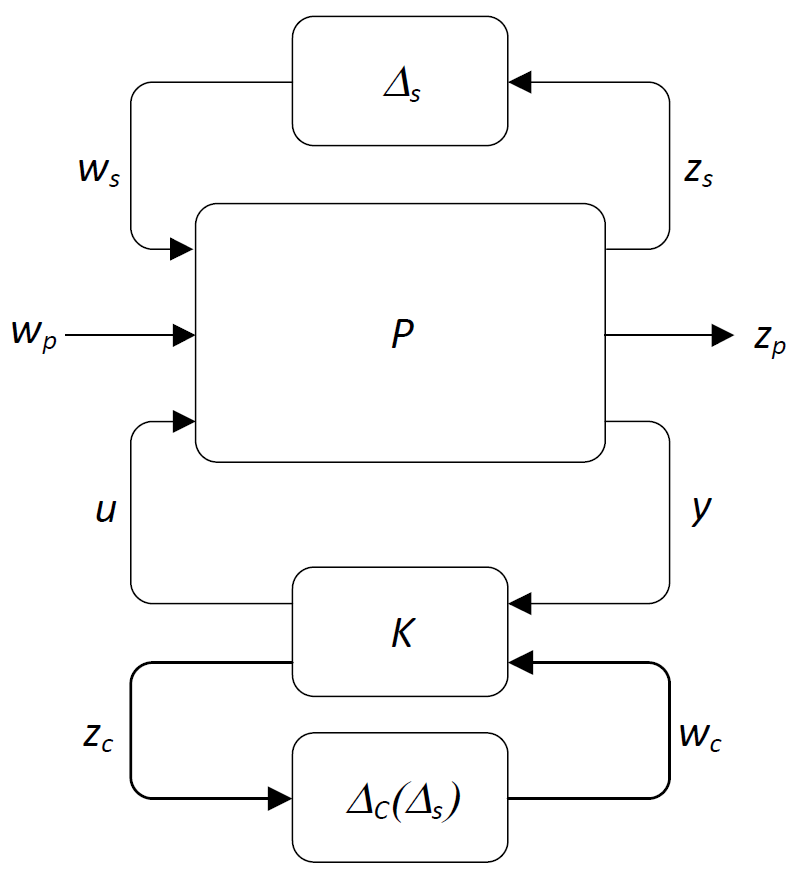
Here:
 is the generalized plant (i.e., it is assumed that the disturbance and performance weights are already incorporated in the plant)
is the generalized plant (i.e., it is assumed that the disturbance and performance weights are already incorporated in the plant) is the scheduling block, which depends on a time-varying parameter vector, which is further specified below
is the scheduling block, which depends on a time-varying parameter vector, which is further specified below is the to-be-designed LPV controller, where
is the to-be-designed LPV controller, where is the LTI part
is the LTI part is the (nonlinear) scheduling function
is the (nonlinear) scheduling function
- the in- and output channels are denoted by
 is the performance channel
is the performance channel is the plant scheduling function
is the plant scheduling function is the controller scheduling channel
is the controller scheduling channel is the control channel
is the control channel
Some characteristics of the algorithm are:
- The algorithms performs a synthesis with the aim to obtain a gain-scheduled controller,
, which, for all![\[u=(k\star\Delta_\mathrm{c}(\Delta_\mathrm{s}))y,\ \ \ \ \Delta_\mathrm{c}(\Delta_\mathrm{s})=\left(\!\!\begin{array}{cc}0&\Delta_\mathrm{s}^T\\ \Delta_\mathrm{s}&0\end{array}\!\!\right)\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-fa5e12069ee5a50857141621353d0846_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 , stabilizes the plant
, stabilizes the plant  and which renders the induced
and which renders the induced  -gain on the channel satisfied.
-gain on the channel satisfied. - The block
 is a member of the uncertainty class ultv (see details here). This class is defined by LTV parametric uncertainties of the form
is a member of the uncertainty class ultv (see details here). This class is defined by LTV parametric uncertainties of the form
Here![\[\Delta_\mathrm{ultv}(\delta)=\sum_{i=1}^N\ldelta_iT_i=\delta_1T_1+\cdots+\delta_NT_N.\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-380ae4c8a32f6cdc4f167c44c7febcc6_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 ,
,  are some fixed matrices
are some fixed matrices  (having the same dimension as
(having the same dimension as  .
. is a piecewise continuous time-varying parameter vector that takes its values from the compact polytope
is a piecewise continuous time-varying parameter vector that takes its values from the compact polytope
with![\[\Lambda=\mathrm{co}\{\delta^1,\ldots,\delta^M\}=\left\{\sum_{a=1}^{M}b_a\delta^a: b_a\geq0,\ \sum_{a=1}^{M}b_a=1\right\}\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-32472277f4ce5980535062627a1a2bce_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 ,
,  as generator points.
as generator points. is assumed to be star convex:
is assumed to be star convex: ![[0,1]\Lambda\subset\Lambda](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-bf669109f8ee6abcbd2a80677d7c143c_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") .
.
- With the aim to trade-off computational complexity with performance, the algorithm allows to impose two different relaxation schemes:
- DG-scalings
- Convex Hull relaxation
- The algorithm imposes the following induced norm constraint on the performance channel :
Here![\[\int_0^{\infty}\left(\begin{array}{c}z_\mathrm{p}(t)\\w_\mathrm{p}(t)\end{array}\right)^T\left(\begin{array}{cc}\frac{1}{\gamma}I&0\\0&-\gamma I\end{array}\right)\left(\begin{array}{c}z_\mathrm{p}(t)\\w_\mathrm{p}(t)\end{array}\right)dt\geq0\ \ \forall t\geq0.\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-0d30465dd65d5ef7c70e1c61d8bcf744_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 is the to-be-minimized induced -gain.
is the to-be-minimized induced -gain.
Usage:
![[K,\gamma]=fLPVsyn(P,\Delta,n_{out},n_{in})](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-32eaa6cced4025fa1fd857bdaf650c0d_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![[K,\gamma]=fLPVsyn(P,\Delta,n_{out},n_{in},options)](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-154d8f9c06b03888c0fccb2d33bf2c7a_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
If feasible, the algorithms returns:
- The stabilizing controller with state space realization
where![\[\left(\!\!\!\begin{array}{c}u\\z_\mathrm{c}\end{array}\!\!\!\right)\!=\!\left[\!\!\begin{array}{c|cc}A_\mathrm{c}&B_y&B_w\\ \hline C_u&D_{uy}&D_{uw}\\C_\mathrm{c}&D_{\mathrm{c}y}&D_{\mathrm{c}w}\end{array}\!\!\right]\!\!\!\left(\!\!\begin{array}{c}y\\w_\mathrm{c}\end{array}\!\!\!\right),\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-5eefde0330afaede285c12aa324a0015_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 is the control channel and is the scheduling channel.
is the control channel and is the scheduling channel. - The (guaranteed) induced -gain on the performance channel of the closed-loop system
 .
.
The inputs should be provided as follows:
- The LTI plant is assumed to admit the following state space description
where![\[\left(\!\!\!\begin{array}{c}z_\mathrm{s}\\z_\mathrm{p}\\y\end{array}\!\!\!\right)\!=\!\left[\!\!\begin{array}{c|ccc}A&B_\mathrm{s}&B_\mathrm{p}&B_u\\ \hline C_\mathrm{s}&D_\mathrm{ss}&D_\mathrm{sp}&D_{\mathrm{s}u}\\C_\mathrm{p}&D_\mathrm{ps}&D_\mathrm{pp}&D_{\mathrm{p}u}\\C_y&D_{y\mathrm{s}}&D_{y\mathrm{p}}&D_{yu}\end{array}\!\!\right]\!\!\!\left(\!\!\begin{array}{c}w_\mathrm{s}\\w_\mathrm{p}\\u\end{array}\!\!\!\right),\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-f85b0bf525471edc77ffb707e059dc9b_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 and
and  are the scheduling and disturbance inputs
are the scheduling and disturbance inputs and
and  are the scheduling and performance outputs
are the scheduling and performance outputs
 is the control input
is the control input is the measurement output
is the measurement output is stabilizable and
is stabilizable and  is detectable
is detectable
- The scheduling block
 is an iqcdelta object, which must be compatible with the uncertainty class ultv (see details here).
is an iqcdelta object, which must be compatible with the uncertainty class ultv (see details here). - The plant input and output dimension data
 and
and  must be specified as follows:
must be specified as follows: - The last input, options, is a structure with various options as summarized in the following table.
![n_\mathrm{in}=[n_{w_\mathrm{s}};n_{w_\mathrm{p}};n_{u}]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-f0e17f4519baae2d9c15b61aa8c781b2_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![n_\mathrm{out}=[n_{z_\mathrm{s}};n_{z_\mathrm{p}};n_{y}]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-b5ee8ab60f806cef45fdd9e6cb3a4a4c_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
| Options | Description |
| options.subopt | If chosen larger than 1, the algorithm computes a suboptimal solution  , while minimizing the norms on the LMI variables , while minimizing the norms on the LMI variables  , ,  , ,  , ,  . .The default value is 1.05. |
| options.condnr | If chosen larger than 1, the algorithm computes a suboptimal solution  , while improving the conditioning number of the coupling condition , while improving the conditioning number of the coupling condition by maximizing .The default value is 1. |
| options.Lyapext | With this option you can specify how the Lyapunov function matrix  is constructed. The options are is constructed. The options are  . .The default value is 5. |
| options.Multiplext | With this option you can specify how the extended multiplier matrix  is constructed. The options are is constructed. The options are  . .The default value is 3. |
| options.constants | options.constants=![[c_1,c_2,c_3,c_4 <em>,c_5,c_6</em>]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-643bfa0596a5aadb041fca40bca46788_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") is a vector of (small) nonnegative constants, which perturb the LMIs as is a vector of (small) nonnegative constants, which perturb the LMIs as  , ,  . .The constants are associated with the following LMI constraints –  , ,  perturb the coupling condition as perturb the coupling condition as –  perturbs the primal solvability condition as perturbs the primal solvability condition as  –  perturbs the dual solvability condition as perturbs the dual solvability condition as  –  and and  perturb the multipliers as perturb the multipliers as The default value is ![1e-9*[1,1,1,1,1,1]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-1c59e92b995633f0bae39510ff353dc3_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") . . |
| options.bounds | In case options.subopt>1, the algorithms miminizes the bounds ,  , ,  , ,  . .In case also the option options.bounds= ![[b_1,b_2,b_3,b_4]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-5103d74b57512b296666510e2f08bb96_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") is specified, one can scale the bounds on the LMI variables as is specified, one can scale the bounds on the LMI variables as  , ,  , ,  , ,  , while minimizing , while minimizing  . .The matrices are empty by default. |
| options.gmax | This option specifies the maximum induced -gain bound on the performance channel . The default value is 1000. |
| options.Parser | The option options.Parser specifies which parser is used: – options.Parser=’LMIlab’ – options.Parser=’Yalmip’ The default options is ‘LMIlab’. |
| options.Solver | The option options.Solver specifies which solver is used when considering Yalmip as parser. See https://yalmip.github.io/ for further info. The default solver is ‘mincx’. |
| options.FeasbRad | This option allows setting the feasibility radius of the optimization problem (see MATLAB → help → mincx for further details). The default value is 1e9. |
| options.Terminate | This option can be used to change the LMI solver options (see MATLAB → help → mincx for further details). The default value is 0. |
| options.RelAcc | This option can be used to change the LMI solver options (see MATLAB → help → mincx for further details). The default value is 1e-4. |
![\[\left(\begin{array}{cc}Y&\gamma I\\ \gamma I&X\end{array}\right)\succ0\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-9388243bdf68925cc6ea490b77e8e7fb_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![\[\left(\!\!\begin{array}{cc}Y&I\\I&X\end{array} \!\!\right)\!\succ\!\left( \!\!\begin{array}{cc}c_1I&0\\0&c_2I\end{array} \!\!\right)\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-877c08eb41089cbdac4c4b03623a6a61_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![\[\bullet^T \left(\!\!\begin{array}{cc}Q_\mathrm{p}& S_\mathrm{p}\\S_\mathrm{p}^T&R_\mathrm{p}\end{array} \!\! \right) \!\! \left( \!\! \begin{array}{c}I\\\Delta\end{array} \!\! \right)\!\succ\!c_5I,\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-5662349685eeb9286450595c3228d4b6_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![\[\bullet^T\left(\!\!\begin{array}{cc}Q_\mathrm{d}& S_\mathrm{d}\\S_\mathrm{d}^T&R_\mathrm{d}\end{array}\!\!\right)\!\! \left(\!\!\begin{array}{c}-\Delta^T\\I\end{array}\!\!\right)\!\prec\!-c_6I,\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-f9c79499db5661af90dbeaf6bae5d42d_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![\[Q_\mathrm{p}\!\succ \!c_5I\ \ R_\mathrm{d}\!\prec\!-c_6I\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-7ffdc6862f734a09322b8e6ec7faa02f_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")