The file Demo_013.m is found in IQClab’s folder demos. This demo performs regional analysis following the numerical example reported in [22].
Here the uncertain system is given by  with
with ![\delta\in[-1,1]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-cdc512599dd4884aa5ed731b8f497e43_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") and the open-loop LTI plant
and the open-loop LTI plant
![\[M=\left(\begin{array}{cc}M_{qp}&M_{qw}\\M_{zp}&M_{zw}\end{array}\right)=\left[\begin{array}{c|cc}A&B_p&B_w\\ \hline C_q&D_{qp}&D_{qw}\\C_z&D_{zp}&D_{zw}\end{array}\right],\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-b790dbfc7ceccadce99e144a2468ea83_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")

 .
.
The demo file Demo_013.m computes the “smallest” ellipsoid that contains the output trajectory  against disturbances
against disturbances  with
with  . The results are obtained with the following lines of code
. The results are obtained with the following lines of code
% Define uncertain plant
M = ...
% Define uncertainty block
de = iqcdelta('u','InputChannel',1, 'OutputChannel',1,'Bounds',[-1,1]);
de = iqcassign(de,'ultis','Length',4);
% Define performance block
pe = iqcdelta('pe','InputChannel',2,'OutputChannel', 2:3,'ChannelClass','P','PerfMetric','e2z');
% Perform IQC-analysis
prob = iqcinvariance(M,{de,pe},'SolChk','on', 'eps',1e-6);
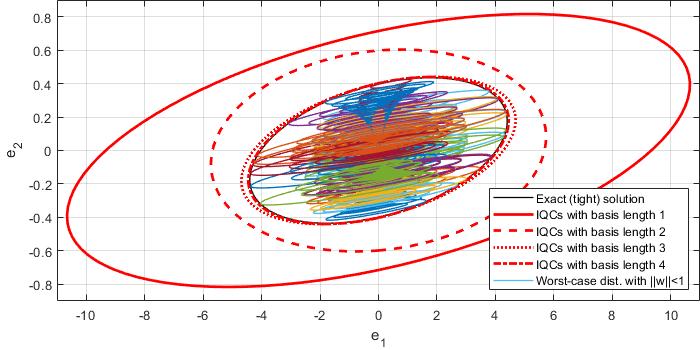
The demo then generates the following figure depicting the ellipsoids obtained for different lengths of the basis function (red lines), the tight ellipsoid (black line) and various worst-case trajectories with and  (i.e., the worst case uncertainty).
(i.e., the worst case uncertainty).
As can be seen, the IQC-analysis produces non-conservative (tight) ellipsoids for higher lengths of the basis function (dynamic multipliers), while for basis length 1 (static multipliers) we obtain more conservative results, which clearly demonstrates the benefit of considering dynamics in the multipliers.