The file Demo_010.m is found in IQClab’s folder demos. Here we reproduce the example from [10] with the plant model
![\[G(s)=\dfrac{10}{(100s+1)}\left(\begin{array}{cc}4&-5\\-3&4\end{array}\right)\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-9c431fff584916fdb86bae9e84c85d2e_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
and the controller
![\[K(s)=\left(1+\dfrac{1}{100s}\right)\left(\begin{array}{cc}2&2.5\\1.5&2\end{array}\right)\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-8bca5795a203f04740cade6f6cef352e_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
For this control system, one obtains an anti-windup compensator by means of the following code.
- Length of the basis function: 3
- Solution check: ‘on’
- Enforce strictness of the LMIs:

% Define random symmetric matrix of dimension n
s = tf('s');
G = ss(10/(100*s+1)*[4,-5;-3,4]);
K = ss(zeros(2),eye(2),[2,2.5;1.5,2]/100,[2,2.5;1.5,2]);
Ke = ss(K.a,[K.b,eye(2),zeros(2)],K.c,[K.d,zeros(2),eye(2)]);
% Define generalized plant
systemnames = 'G Ke';
inputvar = '[p{2};r{2};u{4}]';
outputvar = '[Ke;r-G;p]';
input_to_G = '[Ke-p]';
input_to_Ke = '[r-G;u]';
cleanupsysic = 'yes';
Paw = sysic;
% Synthesize anti-windup compensator
AWopt.FeasbRad = 1e4;
AWopt.constants = [1e-6,1e-6,1e-6];
AWopt.subopt = 1.03;
[Kaw,ga] = fAWsyn(Paw,[2,2,2],[2,2,4],AWopt);
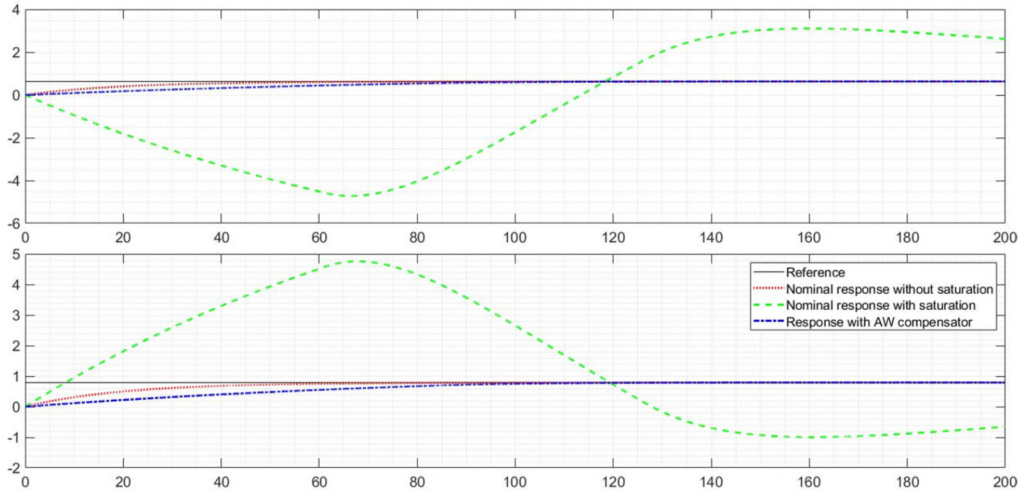
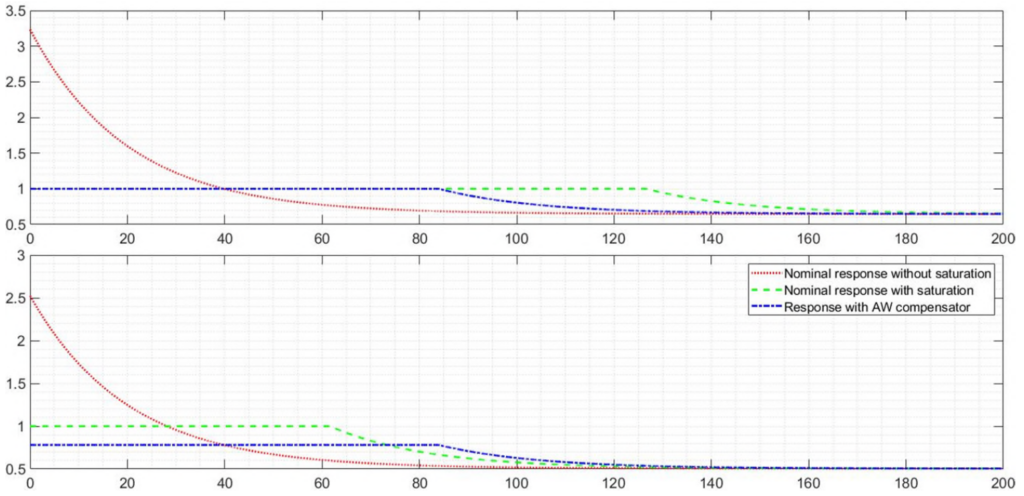
The system responses have been simulated for a step command at  for the nominal system without saturation, with saturation and with saturation and anti-windup compensator in the following two figures respectively. As can be seen, the control performance hugely degrades in case the saturation nonlinearity is included. Moreover, when the anti-windup compensator is added to the control loop, performance can almost be recovered. Further details are found in [10].
for the nominal system without saturation, with saturation and with saturation and anti-windup compensator in the following two figures respectively. As can be seen, the control performance hugely degrades in case the saturation nonlinearity is included. Moreover, when the anti-windup compensator is added to the control loop, performance can almost be recovered. Further details are found in [10].