
IQClab also offers the possibility to perform an anti-windup compensator design. This allows to design compensators that prevent integrator windup in case of large control errors and limited actuator power.
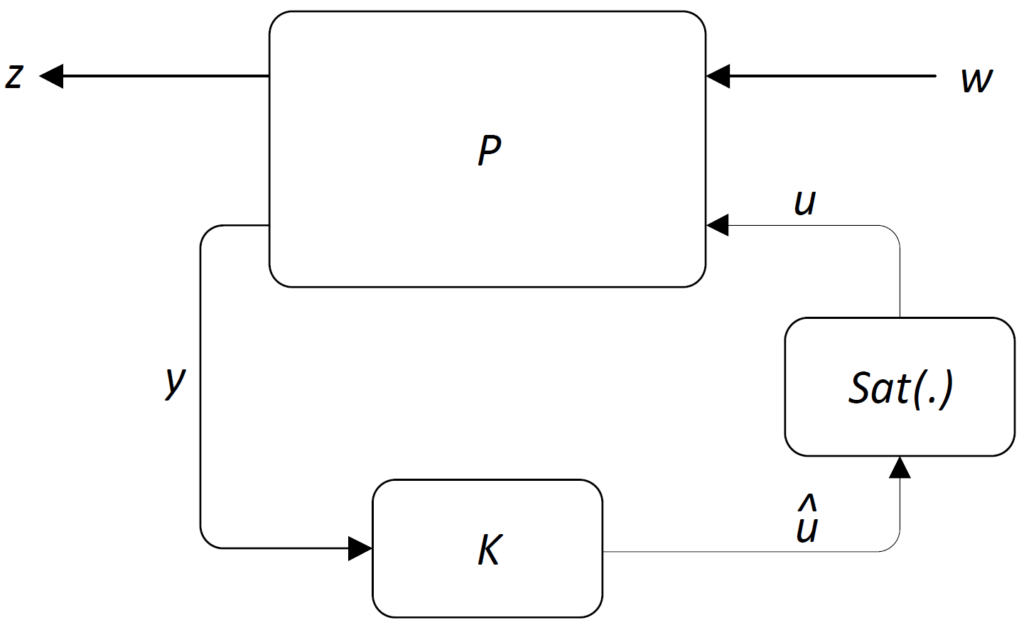
In case of saturation, we are coping with the configuration shown in the following figure, where  is the generalized plant,
is the generalized plant,  the controller, and
the controller, and  a standard saturation nonlinearity.
a standard saturation nonlinearity.
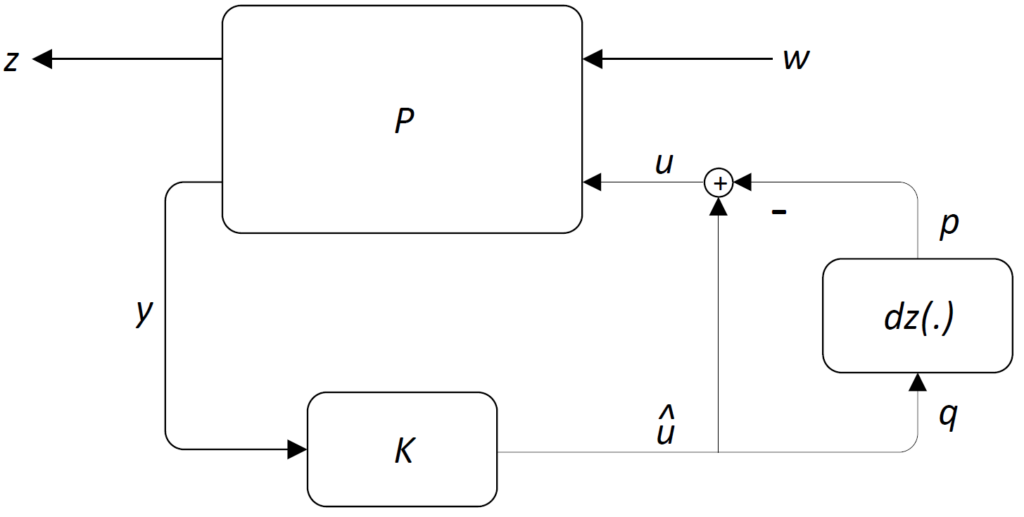
To pull out the saturation nonlinearity as an uncertainty, one can equivalently reformulate the interconnection as shown in the following figure with  .
.
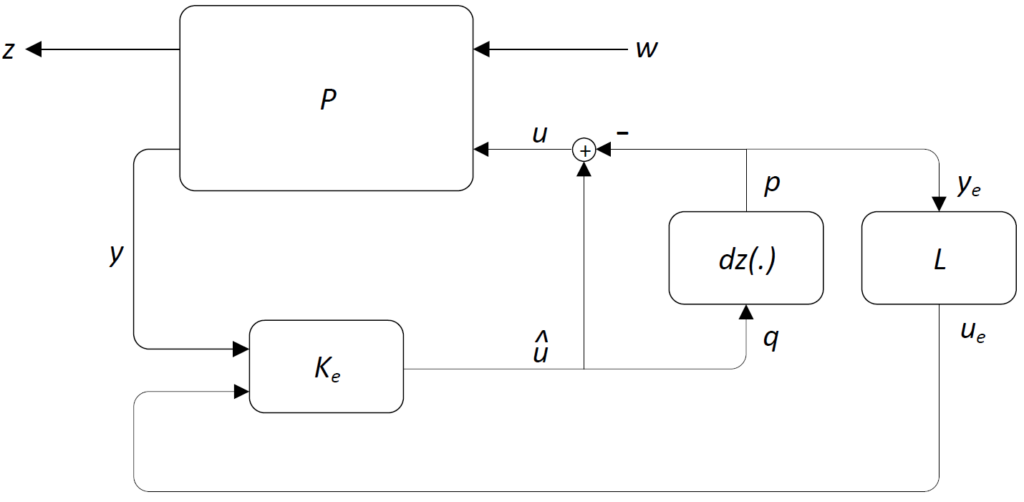
By now extending the controller  as
as
![\[\hat{u}=\left[\!\begin{array}{c|ccc}A_K&B_K&I&0\\ \hline C_K&D_K&0&I\end{array}\!\right]\!\!\left(\!\!\!\begin{array}{c}y\\u_{e_1}\\u_{e_2}\end{array}\!\!\!\right),\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-c00272355c7037c50827cb55d7ee6dd9_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 is the anti-windup compensator.
is the anti-windup compensator.
The corresponding generalized plant  is therefore given by
is therefore given by ![\[\left(\!\!\!\begin{array}{c}q\\z\\y_e\end{array}\!\!\!\right)\!=\!\left[\!\!\begin{array}{c|ccc}A&B_p&B_w&B_u\\ \hline C_q&D_{qp}&D_{qw}&D_{qu}\\C_\mathrm{z}&D_{zp}&D_{zw}&D_{zu}\\0&I&0&0\end{array}\!\!\right]\!\!\!\left(\!\!\begin{array}{c}p\\w\\u\end{array}\!\!\!\right),\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-d37c8d715bce1b4aee78dfb4e7481e25_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 and
and  are the uncertainty and disturbance inputs
are the uncertainty and disturbance inputs and
and  are the uncertainty and performance outputs
are the uncertainty and performance outputs is the control input
is the control input is the measurement output
is the measurement output
The design algorithm considered here is from [10]. This is an elementary, but potentially effective algorithm, which yields static compensators, while minimizing the induced  -gain constraint on the performance channel
-gain constraint on the performance channel  :
: ![\[\int_0^{\infty}\left(\begin{array}{c}z(t)\\w(t)\end{array}\right)^T\left(\begin{array}{cc}\frac{1}{\gamma}I&0\\0&-\gamma I\end{array}\right)\left(\begin{array}{c}z(t)\\w(t)\end{array}\right)dt\geq0\ \ \forall t\geq0.\]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-daf9f42fd1b571db3f0ca0805bf978e2_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
 is the to-be-minimized induced -gain.
is the to-be-minimized induced -gain.
Usage:
![[L,\gamma]=fAWsyn(P_e,n_{out},n_{in})](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-4609ec4eed57366734708ba9be4f4e9c_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![[L,\gamma]=fAWsyn(P_e,n_{out},n_{in},options)](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-d8c6041d400107c09dc28dd459cd70a6_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
If feasible, the algorithms returns:
- The anti-windup compensator gain
 .
. - The (guaranteed) induced -gain on the performance channel of the closed-loop system
 .
.
The inputs should be provided as follows:
- The LTI plant is assumed to admit the state space description mentioned above.
- The plant input and output dimension data
 and
and  must be specified as follows:
must be specified as follows: - The last input, options, is a structure with various options as summarized in the following table.
![n_\mathrm{in}=[n_p;n_w;n_u]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-7ae8c1c72149fccdcda497afa885f2bf_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
![n_\mathrm{out}=[n_q;n_z;n_y]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-9345ec47b43548bfc931df8b25d19299_l3.png?media=1702023987 "Rendered by QuickLaTeX.com")
| Options | Description |
| options.alpha | If specified, options.alpha defines the sector constraint ![[0,\alpha]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-5ddf21adbd25c49479f2c256279de51c_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") , ,  . .The default value is 1. |
| options.constants | options.constants=![[c_1,c_2,c_3]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-81581d0bc123a82092a0f50d47ed247d_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") is a vector of (small) nonnegative constants, which perturb the LMIs as is a vector of (small) nonnegative constants, which perturb the LMIs as  , ,  . .The constants are associated with the following LMI constraints –  perturbs the main solvability condition as perturbs the main solvability condition as  –  perturbs the Lyapunov matrix as perturbs the Lyapunov matrix as  –  perturbs the sector constraint IQC-multiplier matrix variable perturbs the sector constraint IQC-multiplier matrix variable  . .The default value is ![[0,0,0]](https://usercontent.one/wp/www.iqclab.eu/wp-content/ql-cache/quicklatex.com-5146d4ef1fb8321a04b550c694259225_l3.png?media=1702023987 "Rendered by QuickLaTeX.com") . . |
| options.Parser | The option options.Parser specifies which parser is used: – options.Parser=’LMIlab’ – options.Parser=’Yalmip’ The default options is ‘LMIlab’. |
| options.Solver | The option options.Solver specifies which solver is used when considering Yalmip as parser. See https://yalmip.github.io/ for further info. The default solver is ‘mincx’. |
| options.FeasbRad | This option allows setting the feasibility radius of the optimization problem (see MATLAB → help → mincx for further details). The default value is 1e9. |
| options.Terminate | This option can be used to change the LMI solver options (see MATLAB → help → mincx for further details). The default value is 0. |
| options.RelAcc | This option can be used to change the LMI solver options (see MATLAB → help → mincx for further details). The default value is 1e-4. |
Futher options
In addition to the previous algorithm, it is also possible to design dynamic robust or gain-scheduled anti-windup compensators using fRobsyn and fLPVsyn respectively.
The application of fRobsyn is clear. Here it is emphasized that this algorithm goes much beyond the previous approach (but is not convex):
- fRobsyn yields dynamic compensators (rather than static ones with fAWsyn), potentially leading to better anti-windup performance.
- fRobsyn allows to consider dynamic multipliers (i.e., Zames-Falb multipliers, which are included in the class usbsr). Again, this offers the potential for obtaining less conservative results.
- fRobsyn allows to include additional uncertainties.
Regarding the application of fLPVsyn, this is illustrated in the following figure.

Here the deadzone nonlinearity was replaced by a time-varying parametric uncertainty  . These are defined as
. These are defined as  .
.