
The file Demo_006.m is found in IQClab’s folder demos. This demo performs an IQC robustness analysis for an uncertain plant that is affected by sector-bounded and slope-restricted scalar nonlinearities. Here it is possible to the following input:
The uncertainty block:
- 3 different sector-bounded scalar nonlinearities
- 3x repeated sector-bounded scalar nonlinearity
- 3 different sector-bounded and slope-restricted scalar nonlinearities
- 3x repeated sector-bounded and slope-restricted scalar nonlinearity
The uncertain system is given by  with the open-loop LTI plant
with the open-loop LTI plant  , where
, where
 ,
,  ,
,  ,
,  .
.
On the other hand, the uncertainty block is defined by:
 with
with  ,
, 
 with
with 
 with
with  ,
,  with
with 
If running scenarios 1. and 2., we obtain the results shown in the following two figures. As can be seen, considering three independent blocks leads to lower bounds on the worst-case  -gains if compared to one block that is repeated trice. In addition, the third and fourth figure demonstrate the advantage of considering both a sector and a slope constraint (instead of just a sector constraint) in the analysis by the favour of the Zames-Falb multiplier.
-gains if compared to one block that is repeated trice. In addition, the third and fourth figure demonstrate the advantage of considering both a sector and a slope constraint (instead of just a sector constraint) in the analysis by the favour of the Zames-Falb multiplier.
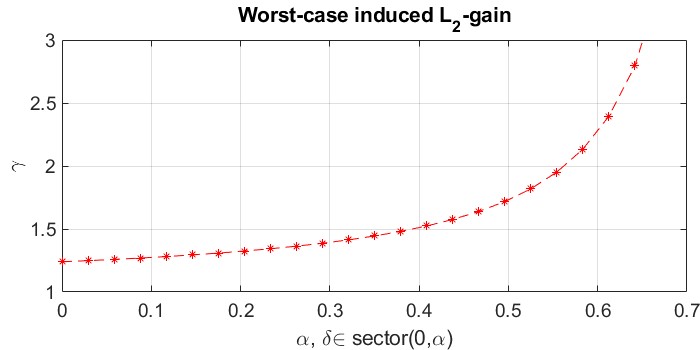 -gain for
-gain for  with increasing sector-bounds
with increasing sector-bounds  .
.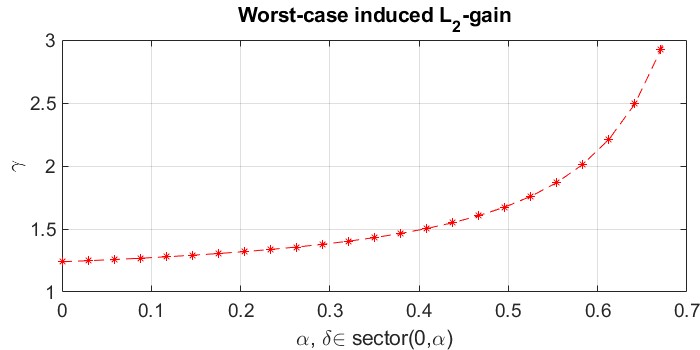 -gain for
-gain for  with increasing sector-bounds .
with increasing sector-bounds . 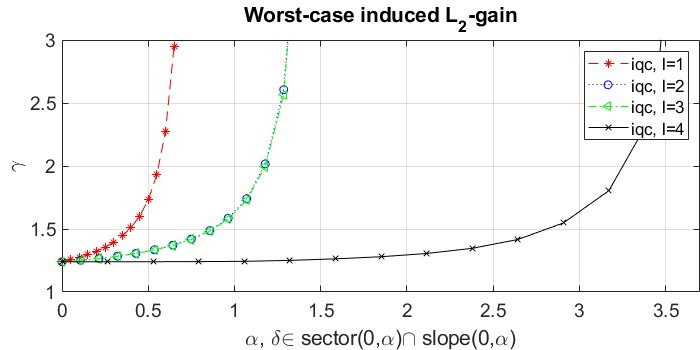 -gain for with increasing sector- and slope-bounds .
-gain for with increasing sector- and slope-bounds . 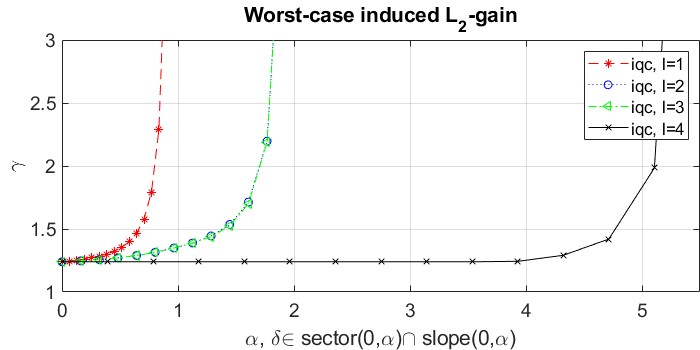 -gain for
-gain for  with increasing sector- and slope-bounds .
with increasing sector- and slope-bounds .